
5 Comments
Chris
9/2/2015 03:19:08 am
Thanks for the call out.
Chris
9/2/2015 07:10:52 am
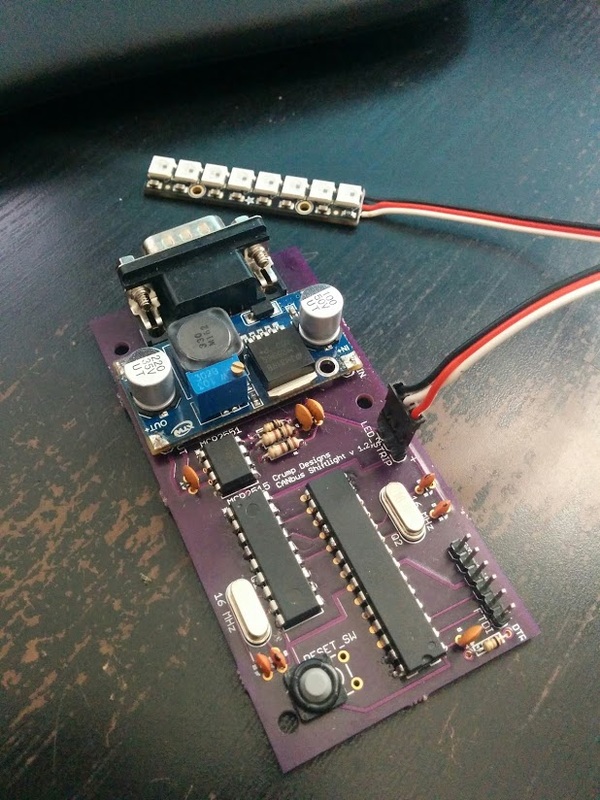
I still need to do some testing but here is the new V2 version of my version.
Jon @ Chippernut
9/3/2015 12:12:16 am
Talk about a fast turn-around! Nice work!! thanks for posting this in the forums too, I know some people will appreciate this. How's the response time?
Chris
9/3/2015 12:41:03 am
Assuming you mean response time of the CAN bus/ecu to the RPM request, It fast! faster than I could really display. I may put some delay in the read request as I'm constantly polling but as far as I can tell it doesn't really matter.
Jon @ Chippernut
9/3/2015 03:16:49 am
We should chat. :-) Shoot me an email, [email protected] I have some things in the works that could greatly benefit your goals. We may have an opportunity for something really great here! Leave a Reply. |
AuthorJon @ Chippernut Archives
July 2024
Categories |
 RSS Feed
RSS Feed